КАК СДЕЛАТЬ РОБОТА
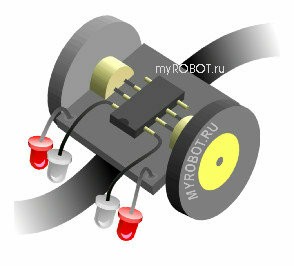
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии.
 Принцип поведения робота основывается на “фоторецепции” и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция – одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
Принцип поведения робота основывается на “фоторецепции” и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция – одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом – ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D , будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с “землей” (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с “землей”. Иногда рядом с такой черточкой пишут три буквы “GND”, что означает “землю” (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.

Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье “Драйвер двигателей L293D”.

Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если – небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.
 Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.

 Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
 Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а “увидев” свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а “увидев” свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Дорогой Бобот, а можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE?
Конечно, можно, но видишь ли, в чем дело, дружище Бибот. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D . К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor. Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А не мог бы ты рассказать об отличиях, которые мне необходимо будет учесть при использовании L293DNE.
С удовольствием, старина Бибот. Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая “1”.
Прости, Бобот, но я не совсем понимаю: как же мне это учитывать?
Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая “1”), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому – логическую “1” (соединим с “плюсом” питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была “1”. Если же мы подадим на наш вход сигнал низкого уровня (соединим с “минусом” питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.
 L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к “земле” подтягивающими резисторами.
L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к “земле” подтягивающими резисторами.
Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический “0”, обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня – pull-up.
Насколько я понял, все, что нам нужно будет добавить в схему простейшего робота, – так это подтягивающие резисторы на входы микросхемы драйвера моторов.
 Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
 А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к “земле”. Что даже несколько упростит схему.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к “земле”. Что даже несколько упростит схему.
И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?
Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
Чтобы сделать робота, “бегающего” за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.
 Задача получившегося робота – реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля “зрения” одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Задача получившегося робота – реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля “зрения” одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
Белый цвет обладает самыми высокими отражающими свойствами, черный – наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.
 Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Поделка робот своими руками из подручных материалов – интересные мастер-классы с фото примерами и идеями
Мальчиков трудно увлечь творчеством. Они ни за что не согласятся вырезать цветочки из бумаги и делать из них аппликации. Но если эта поделка – робот, то тут уж вы сынишку не оттащите от стола, ведь он так увлечется работой, что будет предлагать разные новые варианты.
- Робот из картонных коробок
- Новогодний костюм
- Робот из пластиковых бутылок
- Из бутылок и скотча
- Робот из крышечек
- Робот из консервных банок
- Фото идеи самодельных изделий в виде робота
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.

Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.

Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.

На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.

Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.
Конструкция получится не очень устойчивая, так что можно обуть робота в детские сапожки или ботиночки.

Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.

Новогодний костюм
Если коробки у вас большие, можно из них сделать маскарадный костюм для ребенка. В этом случае коробку-голову сразу приклеить к коробке-туловищу. На голове вырезать квадратное отверстие, чтобы малыш мог смотреть через него.

Внутри сделать прорезь для головы сынишки. А руки и ножки роботу смастерить из гибких вентиляционных труб, выбрав нужный диаметр.

Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Из бутылок и скотча
Если предыдущая конструкция показалась вам слишком сложной в изготовлении, можете обойтись методикой попроще. Три 1,5-литровых пластиковых бутылки стяните скотчем, не снимая пробок – это тело робота. К каждой крайней бутылке пробкой к пробке скотчем присоедините еще по одно такой же бутылке – получились ноги.

Разрежьте следующую бутылку пополам, и ту половинку, которая без пробки, примотайте скотчем в средней бутылке – это голова. Голову украсьте двумя пробками – глазами.

Руки можно сделать из поллитровых бутылок, нарезав их сегментами и соединив между собой.
Еще из двух бутылок вырежьте ладони и присоедините их к рукам. Поделка готова!

Робот из крышечек
Довольно интересным получится робот из пластиковых крышечек. Благодаря резинке, скрепляющей все элементы, у него будут двигаться руки и ноги. Предлагаем подробный мастер-класс изготовления трансформера из 22 крышечек:
- Для каждой ноги понадобится по 4 крышечки. В первых двух делаем отверстие горячим шилом посередине, в третьей – в донышке, но ближе к краю, а в четвертой проделываем сразу два отверстия – в центре и сбоку.
- В резинку с одной стороны вдеваем иголку, а с другой затягиваем плотный узел.
- Продеваем две крышки с центральным отверстием, затем идет крышка со сдвинутым центром и крышка с дырой в боковине. Завязываем резинку на узел.
- По этой же схеме собираем вторую ногу.
- Для изготовления руки проделываем в трех крышечках отверстия по центру, а в четвертой – сбоку.
- Вначале протягиваем иголку с резинкой в крышечку с боковым отверстием, затем поочередно – с центральными. Затягиваем резинку на узелок.
- Для головы нам понадобится одна крышечка и один колпачок от тюбика из-под зубной пасты. Для туловища – пять крышечек. В двух из них делаем отверстия по центру, в двух других – по два симметричных отверстия по бокам, а в пятой – сразу три отверстия по центру и по бокам.
- Стягиваем резинкой крышечку-голову, колпачок от зубной пасты и крышечку с тремя отверстиями. За ними идет крышечка с двумя отверстиями и крышечка с одни отверстием. Две оставшиеся крышечки – плечи – продеваем резинкой в боковые отверстия на туловище.
- В крайних крышечках рук проделываем по одному боковому отверстию. Пропускаем резинку сквозь него, затем через плечо и крышечку с тремя отверстиями. Далее – вторая крышка плеча и крайняя крышка второй руки.
- Через боковое отверстие в ноге пропускаем резинку, далее она проходит сквозь боковые отверстия нижней крышечки туловища, сквозь боковое отверстие во второй ноге и стягивается.

В принципе, наш робот-трансформер готов. Осталось только добавить ему глаза. Можно сделать отверстия в крышечке-голове, аппликацию или приделать их из пластилина. Роботу понадобится гранатомет. Для этого прекрасно подойдет колпачок от шариковой ручки. Его можно прикрепить к руке, поместить за спину или поставить на плечо.

Робот из консервных банок
Красивый робот получается из консервных банок. Нужно вставить одну банку в другую. Руки и ноги сделать из металлических крышечек, которыми закрываются стеклянные поллитровые бутылки с напитками. Просверлив в центре каждой крышечки отверстие, их нужно стянуть между собой на проволоку, закрепив концы. Спереди на корпус робота прикрутить болтами две такие же крышечки.

На верхней банке вырезать отверстие – рот, прикрутить два болта – глаза. А уши сделать из кругов из фольги, закрепив их по бокам так, чтобы они торчали в разные стороны.

Не забудьте сделать фото вашей работы поэтапно и выложите на свою страничку в соцсеть. Пусть посетители позавидуют вашим умениям, а, может, даже переймут неординарный опыт.
Инструкции по созданию простых роботов своими руками:
Этот раздел сайта посвящен пошаговым инструкциям с фото и видео по созданию простых роботов их подручных материалов в домашних условиях. Как сделать простейшего beam робота или виброробота своими руками, схемы роботов для начинающих робототехников, основы и уроки робототехники для начинающих. Самый простой робот своими руками, как сделать простого робота в домашних условиях, поэтапные пошаговые схемы по сборке простейших beam (бим) и вибро роботов. Создание простого робота для детей или начинающих робототехников. Уроки робототехники для начинающих о том, как сделать очень простого робота дома в домашних условиях:

В этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту. Достаточно легкий в изготовлении робот, не требующий никаких дорогостоящих комплектующих. Попробуйте сделать такого робота самостоятельно. Смотрите подробности.

В этом проекте мы опишем, как сделать простого, пневматического мягкого робота, который сделан из силиконовой резины, и формы с использованием 3D печатных деталей. Проект основан на мягких захватах и шагающем механизме.

Представляем вам очень простого робота по имени Buck. Принцип его работы похож на движения насекомых. С пружинистыми ногами робот создает немного шума при ходьбе. Мы поможем вам создать это милое устройство без особых усилий и денежных затрат.

Этот интересный робот называется очень просто – Walker, то есть шагающий механизм. Он может быть построен в общей сложности за 4 часа, но при второй попытке время на создание робота может занять всего 10 минут. На самом деле, он очень простой и не требует каких-либо дорогих материалов и программирования.

Представляем интересный механизм – робот Lobsterbot. Особенность данного устройства заключается в его простоте. Всё, что нужно для управления – это чип и реле. По принципу движения робот напоминает рака – отсюда и название: Lobsterbot. С помощью этого робота можно познать азы построения умных роботов, которые пригодятся для дальнейших исследований в области робототехники.

Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим.

Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.Mousebot – простой бот реагирующий на свет и при столкновении со стеной способный двигаться назад и поворачивать в другую сторону. Данный проект является довольно дешевым, если у вас есть старая мышь в наличии.

Что такое робот- bristlebot? Это вибрирующий робот, построенный на основе зубной щетки. Но если вас не устраивает такой простой вариант вибробота на зубной щетке, предлагаем добавить дополнительные особенности, которые не требуют ни дорогих технологий, ни программирования. Например, ваш робот смог бы реагировать на свет. Это достижимо с помощью специального сенсора.

На этот раз поговорим о фонариках. Эти вещи служат нам «солнцем» в руках, когда мы оказываемся в темноте. Целью данного проекта является создание робота-фонарика, который будет следить за своим пользователем во всем помещении и ориентироваться на потребности пользователя в освещении.

Мы не раз уже писали о роботах, построенных на основе зубной щетки. Но этот интересный робот заинтересует любого желающего попробовать свои силы в построении самодельных домашних роботов. Его создание может занять всего пару часов. Для этого нужно сосредоточиться на деле и следовать инструкции. Робота должна проводиться в хорошо проветриваемом помещении.

Для того, чтобы создать виброробота не обязательно нужны зубные щетки. Эти устройства создаются легко из старых нерабочих вещей, как например, фотоаппарат. Кроме фотоаппарата для построения робота понадобится немного скотча и несколько долларов. Если у вас есть старый поломанный и ненужный фотоаппарат, можете смело приступать к конструкции этого робота. В этом вам поможет следующая пошаговая инструкция.

Представляем вам вибрирующий робот на основе жестяной банки из-под газированного напитка, который гудит, как насекомое и двигается сам по себе. Легкая конструкция с множеством возможностей для детей, чтобы научиться делать робота самостоятельно. Этот виброробот очень хорошо работает на кафельном полу, где он следует и опирается на плитке, когда его нога застревает в щели. В зависимости от того, насколько он сбалансирован, он будет двигаться по комнате, и станет отличной забавой для молодежи.
- keyboard_arrow_left В БУДУЩЕЕ
- 1
- 2
- 3
- В ПРОШЛОЕ keyboard_arrow_right
В этом разделе вы можете найти схемы и собрать простого робота, маленьких простейших роботов, иными словами этот раздел это робототехника для начинающих своим руками в домашних условиях. Простые роботы своими руками, beam роботы для начинающих, вибророботы из подручных средств дома. Пошаговые поэтапные инструкции с фото и видео процесса сборки самодельного простого робота в домашних условиях. Как сделать самый простой робот своими руками, создание просто простого робота для детей, собрать простейшего робота из хлама дома самостоятельно.
Так же здесь есть инструкции по сборке beam роботов (бим роботов) и вибророботов своими руками. Описание процесса создания простейших роботов, фото и видео инструкции по о том как начать делать простого робота.
Смотреть инструкции и схемы очень простых роботов, которых можно сделать в домашних условиях из подручных материалов. Очень простые и самые простые роботы для самостоятельного изготовления. Делаем простейшего робота дома в домашних условиях своими руками.
Поделка робот: схемы и пошаговое описание изготовления робота своими руками
Любому мальчику нравится играть со всяческими роботами.
С малых лет их увлекают простые и смешные роботы, а с возрастом нравятся более эксклюзивные конструкции.
Про роботов существует много мультфильмов и современных экшенов. Они могут быть добродушными или злыми.

Всякому ребенку понравится, если у него среди игрушек будет дома любимый герой. Такую игрушку можно приобрести в магазине, их там большой выбор.
Но намного лучше и интереснее выполнить поделку робота своими руками. Проще всего сделать его из бумажного материала.
Простой бумажный робот
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
- схема робота;
- лист бумаги;
- ножницы;
- клей.
Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.
На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.
При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.
Склеивать поделку необходимо клеем ПВА, который обладает прочным клеевым свойством и не марает бумагу.
Делая сбор основы, необходимо соблюдать все пункты инструкции, иначе робот не сможет двигаться.
Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.
Робот из спичечных коробков
Симпатичную поделку в виде робота можно выполнить, взяв за основу коробки от спичек.
Зная, как сделать поделку робот, следует подготовить следующие материалы:
- 9 спичечных коробков;
- цветная бумага;
- клей.
Первый делом нужно наклеить цветную бумагу на 5 спичечных коробков (ручки, туловище и голова). На голове из коробка сделать очертания лица используя чёрный маркер.
Остальные четыре спичечных коробка необходимо склеить, а верхнюю часть оклеить любой цветной бумагой.
После сбора всего робота, украсьте его по своему усмотрению. На голове можно приделать аннтенки из спичек. Туловище робота можно приукрасить, наклеив дополнительные частицы.
Геометрическая аппликация своими руками
И маленьким детям под силу справиться с заданием, делая весёлую аппликацию с рисунком робота, пользуясь геометрическими фигурами.
Предварительно следует сделать необходимые формы фигур на бумаге и вырезать их. Это могут быть различные по форме треугольники, круги или квадраты.
С помощью клеевого карандаша на бумажный лист приклеиваем вырезанные фигуры, делая детскую поделку робот. Маркером рисуем мелкие элементы и разукрашиваем фон.
Такая творческая деятельность научит детей различать цвета и формы, к тому же занятие способствует развитию мелкой моторики.
Робот из фетра
Помимо обычного материала в виде картона, металла или пластика, поделка роботы для детей можно также сделать из фетра. Такая поделка подойдёт для игры маленьким девочкам.
Для создания флисового робота в стиле амигуруми вырезаем из ткани части по размерам:
- 4,5 см для туловища;
- 3,5 см для головы;
- 2,0 см для ног;
- 1,5 см для рук.
Для любой из частей туловища требуется по 6 квадратов флисовой ткани. По необходимости величину заготовок можно повысить для увеличения размера мягкой игрушки.
Делаем выкройки без припусков. Сшиваем части со всех сторон, применяя сметочный шов. В итоге должен выйти кубик. Перед прошиванием последней из сторон, заполняем кубик любым наполнителем.
Внимательно отслеживаем, чтобы из кубика не торчало лишних волокон. Если они есть, их можно обрезать ножницами. При выполнении работы, требуется делать все аккуратно.
Подобным образом сшиваем остальные части туловища робота, после закрепляем между собой клеем. На месте глаз пришиваем бусинки.
По своему усмотрению робота можно украсить бантиком или другими элементами. Маленькую поделку можно сделать в форме магнита, и прикрепить её на холодильник.
Робот из консервной банки с магнитом
Увлекательные игры для развития детей разрешается проводить, пользуясь пустыми консервными банками. Также подойдут небольшие магниты, болтики, крышки из-под бутылок и другие приспособления.
Из каких же элементов можно сделать самостоятельно интересные поделки роботов. Ребёнок от такого будет в восторге. Основная часть поделки — это консервная банка. К ней будут присоединены разные части тела.
Для лёгкой смены деталей на теле, присоедините к ним магниты на клей. Когда ребёнок хочет что-то взять, достаточно лишь поднести маленькую банку к предмету, и всё примагнититься к ней.
Подобное волшебство понравится любому ребёнку и даже взрослому.
Если предоставить творческому чаду необходимый запас материала для опытов, он сможет сделать самых различных роботов. Осталось только запастись терпением и можно приступать к работе.
Смешные роботы — поделки готовы! С такими игрушками дети будут увеличены ими долгое время.
Фото поделки робот
Понравилась статья? Подпишитесь на канал, чтобы быть в курсе самых интересных материалов
Как сделать робота своими руками в домашних условиях?
Компания Google осуществила детскую мечту многих людей и создала конструктор, из которого можно самостоятельно собрать робота. Причем речь идет не о безделушке с мотором и парой лампочек, потому что при должном старании конструктор будет обладать чем-то вроде искусственного интеллекта. Корпус робота можно сделать из бумаги, причем схема доступна бесплатно и ее нужно просто распечатать, вырезать и собрать. На начальном этапе программировать тоже не нужно, потому что исходный код тоже можно скачать. Правда для робота нужно будет купить «мозг» и специальное устройство, чтобы он мог обучаться новым командам. Выглядит так, что сборка робота займет много времени, но компания позиционирует свой конструктор как нечто простое и быстрое в освоении. Давайте изучим новую идею Google и выясним, насколько это правда?
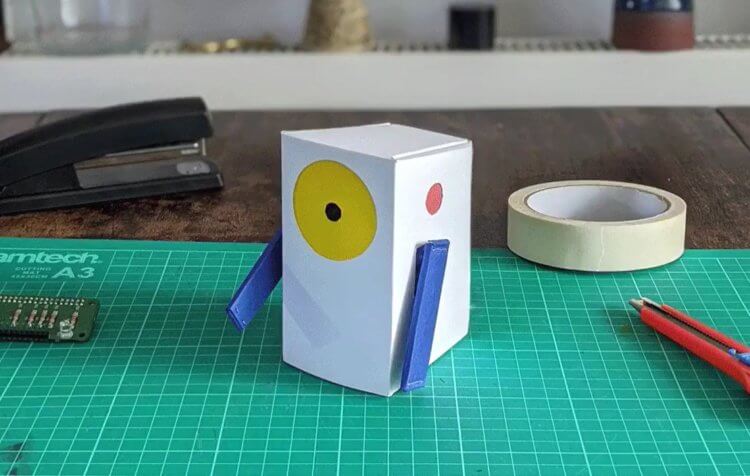
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Конструктор был представлен подразделением Google Creative Lab. Робот называется ALTO, что является сокращением от «A Little Teachable Object» (маленький обучаемый объект). Проект создан для того, чтобы люди смогли собрать робота на дому и получили базовые знания о машинном обучении. Машинным обучением называется умение искусственного интеллекта самостоятельно вырабатывать навыки выполнения новых задач. В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
- Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
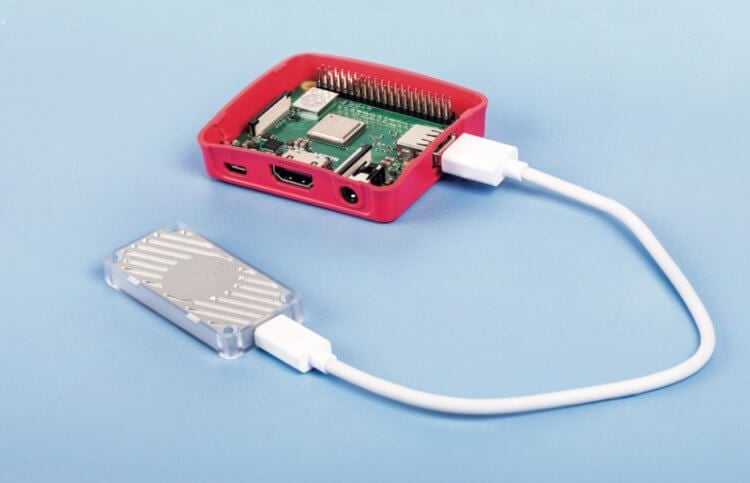
Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
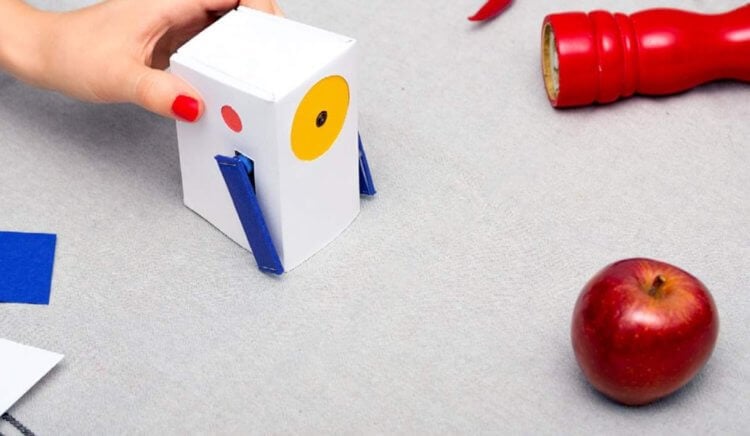
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Если вам интересны новости науки и технологий, подпишитесь на наш канал в Яндекс.Дзен. Там вы найдете материалы, которые не были опубликованы на сайте!
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Хочу стать инженером и собрать робота. У меня получится?
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу. Вместе с благотворительным фондом Олега Дерипаски «Вольное дело», реализующим программу по робототехнике для школьников, подростков и студентов, мы сделали простой гид для начинающих инженеров (впрочем, взрослым он тоже вполне может пригодиться). Объясняем, как собрать своего первого робота.
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.

Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Участники программы «Робототехника», которую поддерживает фонд Олега Дерипаски «Вольное дело», уже через несколько лет обучения могут создавать куда более сложные проекты и придумывают инженерные решения для самых разных задач. Например, разрабатывают системы для автоматической сортировки мусора. Если вам кажется, что всё это очень сложно, вы правы, но научиться этому может каждый.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка. Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.
Перед первой попыткой написать программу для робота достаточно разобраться, что такое цикл и условный оператор . Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Меня случайно не убьет током?
Нет. Если, конечно, вы не собираетесь начать сразу с постройки огромных промышленных роботов. Пока речь идет о небольших игрушках, сила тока и напряжение настолько малы, что даже если вас и ударит, то вы ничего не почувствуете. Самое страшное, что можно сотворить, конструируя маленького робота, — небольшой взрыв на столе. Но это случится, только если вы перепутаете «плюс» с «минусом» во время работы с электролитическим конденсатором.
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда. Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Самый первый — вряд ли. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой цель попроще. Например, на базе того же Arduino можно собрать самых разных движущихся роботов: они могут ездить просто вперед-назад, по сложной заданной траектории или по нарисованной линии. Робот, который самостоятельно объезжает препятствия или как-то еще меняет свое поведение при приближении к разным объектам, тоже посильная задача. Еще первый робот вполне сможет включать и выключать что-нибудь, ориентируясь на уровень освещенности, совершать какие-то действия в определенный момент, заданный таймером, или по нажатию кнопки.
Ну а в будущем, если продолжите заниматься робототехникой, сможете сделать и робота-помощника, и робота-охранника, который умеет стрелять. Еще можно собрать робот-пылесос собственной модели. В России и в мире постоянно проводятся соревнования по робототехнике, на которых роботы-участники сражаются, играют в футбол, участвуют в гонках и просто демонстрируют свои выдающиеся способности. Например, на «РобоФесте», который ежегодно организует фонд «Вольное дело», можно увидеть сотни разных роботов.
Умение собирать роботов как-то пригодится мне в жизни?
Да, еще как. Вы неизбежно научитесь программировать. Причем будете в состоянии не просто писать код, который что-то как-то делает, но и понимать всю цепочку, по которой набранные вами на клавиатуре символы преобразуются в действия целого механизма. Уметь программировать в наше время почти так же полезно, как знать английский язык: пригодится, даже если вы маркетолог или продавец мороженого.
Знание робототехники при желании позволит вам здорово усовершенствовать быт и даже сделать свое жилище «умным», не покупая дорогих готовых решений. Световой будильник? Запросто. Лампы с датчиками движения? Да легко. Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
А если мне понравится и я захочу сделать это своей профессией? Куда податься?
Самое очевидное решение — в программисты. Причем не обязательно туда, где работают непосредственно с «железом»: навыки, полученные во время занятий робототехникой, пригодятся в любой сфере — от промышленного до веб-программирования.
Если возникнет желание связать свою дальнейшую судьбу именно с роботами, придется получить соответствующее высшее образование. Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Реставрация и декор старого советского табурета!

Драсьте!
Спасибо что заглянули, очень приятно.

Итак. Стоял у меня в кладовке старый советский табурет, жена методом исключения подсчитала что куплен он родителями был еще в 40х годах прошлого века. Довольно таки старенький но все еще достаточно крепкий экземпляр. И вот, жена попросила его как то облагородить, подкрасить или может обклеить мебельной пленкой, что то типа винила. Да и подклеить, за это время он конечно же рассохся. В общем придать ему более менее презентабельный вид, его же можно еще эксплуатировать, а он стоит мертвым грузом, место занимает.
Но мы же легких путей не ищем или, как говориться, делать — так уж делать.
С мыслью о том, как я его вижу в новом исполнении и прикинув по материалам которые у меня есть и что надо прикупить лег спать. Утро вечера мудренее! На следующий день на работе все обдумал и окончательно прикинул проект в своей голове. Табурет почему то виделся мне в стиле связанном со старыми парусными кораблями 16-18 веков. Ну а дальше что получилось, смотрите сами.
Ну что же надо делать, раз уж решился. Сгонял в Оби, подкупил необходимого материала для декора.
Погнал к свояку в гараж. И приступил к работе.
Для начала нужно было содрать старую краску со всех поверхностей табурета. Вооружившись строительным феном и скребком приступил к удалению старой краски.



Красочка ввиду своего не однократного слоя и старения удалялась достаточно не охотно. Но мы же терпеливые!
Едем дальше. По ходу удаления краски, начинаем разбирать сею конструкцию. И уже удалять краску с остальных (внутренних) поверхностей. Далее все это хозяйство за чистилось машинкой с наждачкой, дабы подготовить поверхность к покраске.



Все пока. Готовим саморезы и клей. Собираем табурет обратно, при этом сажая его части на клей. Я использовал “Момент монтаж” в тубусе под монтажный пистолет. Верхнюю часть засверливал и крепил к ногам на саморезы.
Дальше табурет протер, обезжирил и нанес грунт. Грунт и краску брал в баллончиках, так по удобнее чем кистью и ровнее.

На загрунтованный табурет на термоклей с помощью термопистолета декорировал канатами.

Все. Табурет подсыхает. Приступаем к покраске. У меня был баллон с красной краской, заполненный примерно на 70%, по грунту так же, может меньше.
Красим. Красный цвет ассоциирует поверхность палубы старого парусного корабля. Канаты, соответственно оснастку парусника, тросы парусов и т.д.

Краска сохнет. Собираю шмотки и мчу домой. Дома табурет до полного высыхания стоял больше суток. Ну и плюс времени не особо было. Но нужно же доделать.
Дальше делаю мягкую сидушку и обтягиваю тканью. Смотрим!
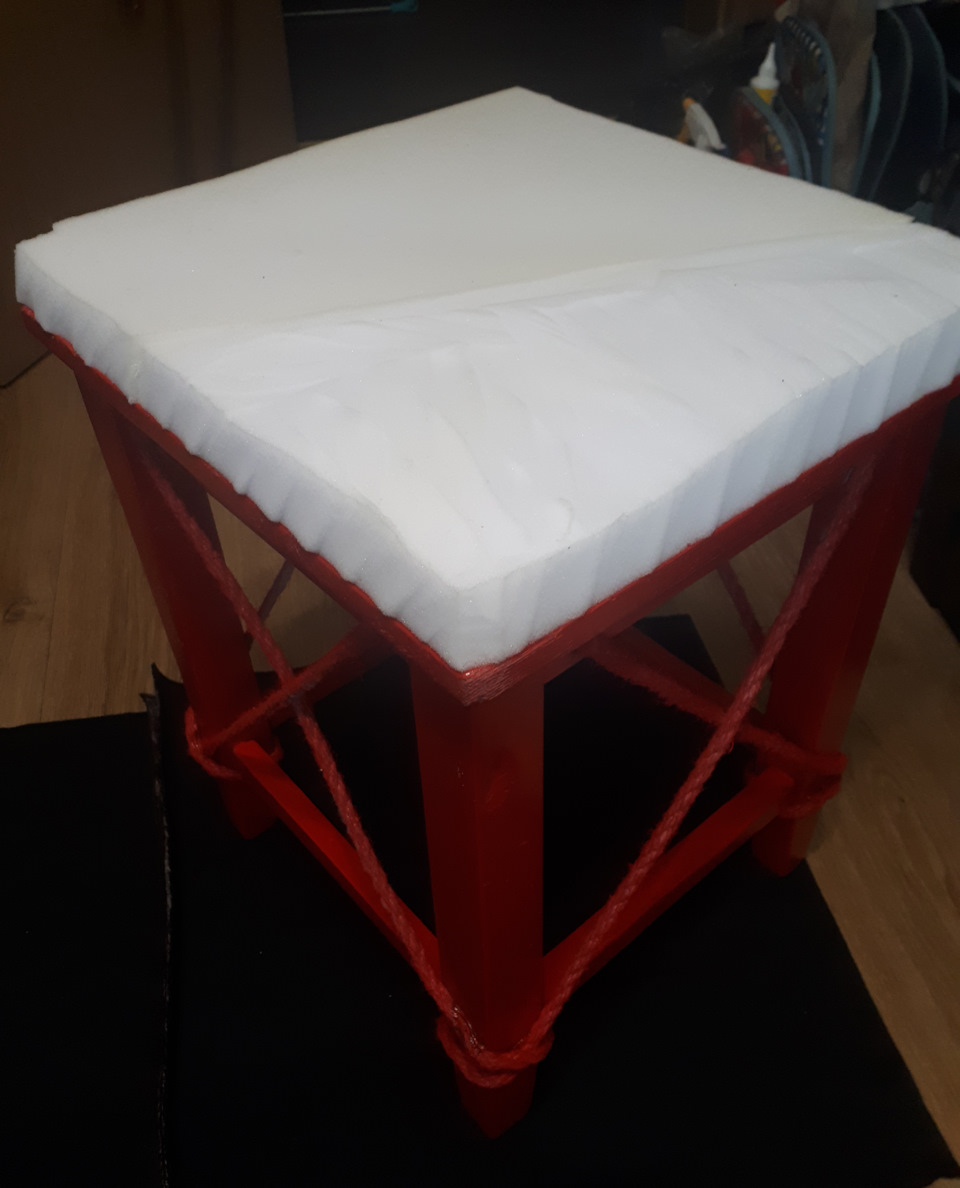
Для мягкой сидушки брал мебельный поролон, целого куска у меня не нашлось, был какой то конусовидный остаток, разрезал его пополам и наклеил 2 половины на клей “Момент универсальный”. Взяло плотно. Лишний поролон обрезал канцелярским ножом по периметру сидушки.

Дальше приступил к обтяжке тканью. Какая ткань не скажу, не шарю, был кусок. Ткань похожа на бархат с рисунком, была с подложкой, поэтому на поролон больше ничего не натягивал, сразу ткань.
Ткань отрезаем по периметру сидушки, оставляя по краям запас сантиметров 10. Мне хватило 8ми сантимов запаса для натяжки ткани, но потом лишнее еще подрезал.
Ткань фиксировал по четырем сторонам строительным степлером. Скобы на 8мм. Шел от середины к краям. Потом когда стороны пробил, заделал углы, срезая лишнюю ткань в углах. Ткань нужно натягивать, чтобы не было провисов и морщин.


С тканью закончил, проверил чтобы не было нигде на ткани морщин, лишнее срезал, пробил степлером еще где потребовалось.

В конце по периметру сидушки, вокруг табурета декорировал толстым канатом. Этот канат ассоциирует швартовый трос. Думал может якорный канат, но нет, там цепь!))
Ну и вот в общем что вышло. Сильно не пинайте, это все же творчество, ну так я увидел, а уж как получилось, судить вам! Жена была в шоке, так как такого не ожидала, думала я просто его подкрашу и подклею. Мне самому понравилась своя работа, а как же по другому!





